Dwindra Sulistyoutomo
Robotics Enthusiast

I wrote further details about my projects and other learning notes on my blog.
See my blog

I love robots, especially humanoid! It has been my dream since I was a kid to build my own robots. The idea of human-robot coexistence has always captivated me, and it’s my dream to see robots become as convenient and accessible as smartphones are today. This ambition has fueled to my pursuit of knowledge in robotics.
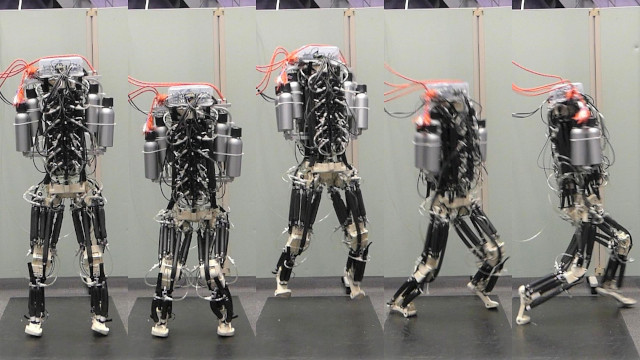
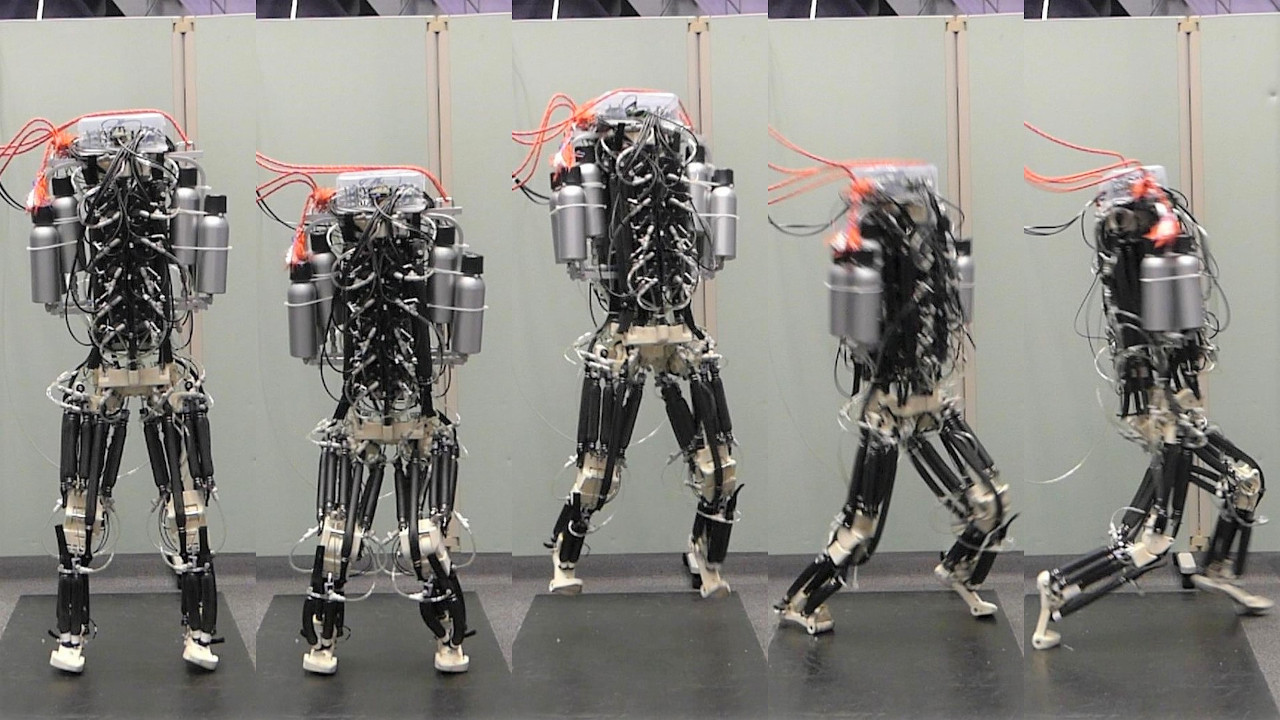
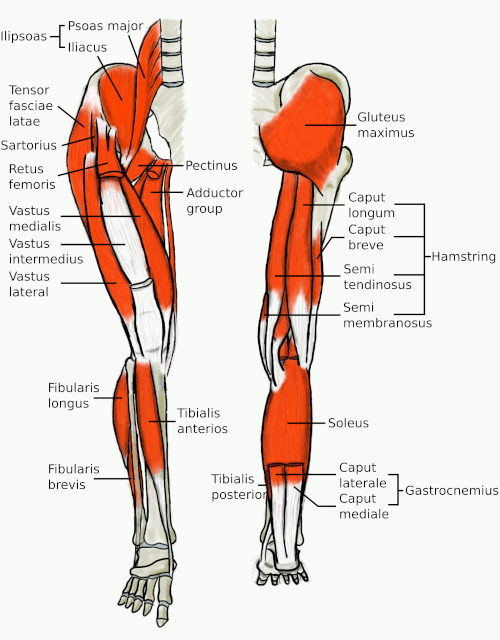
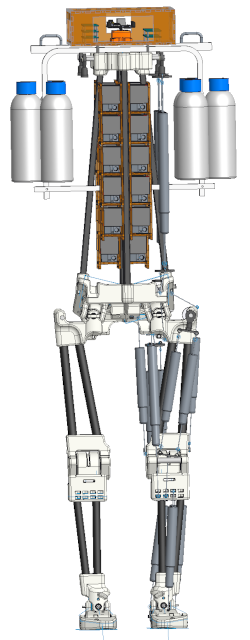
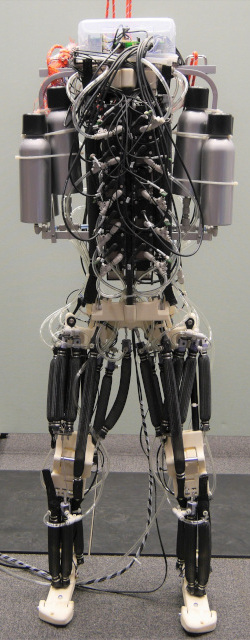
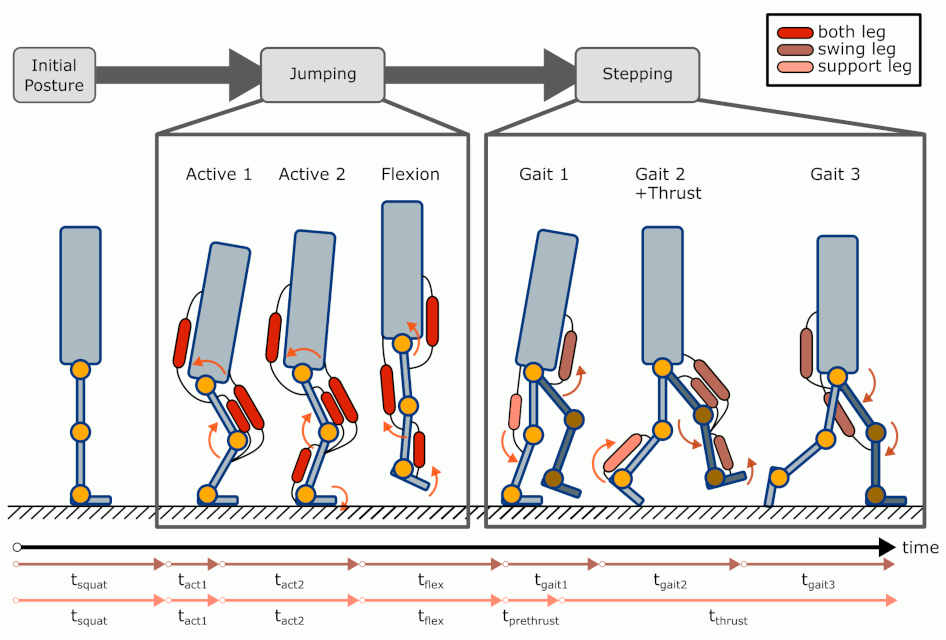
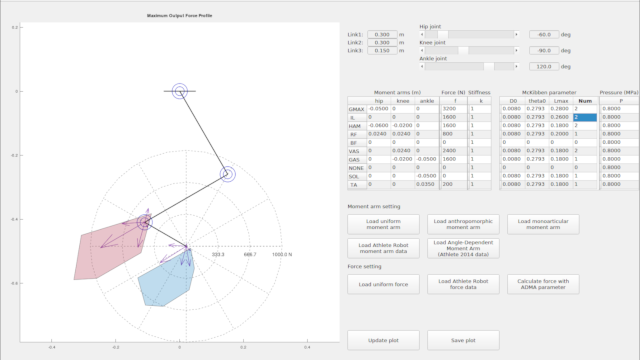
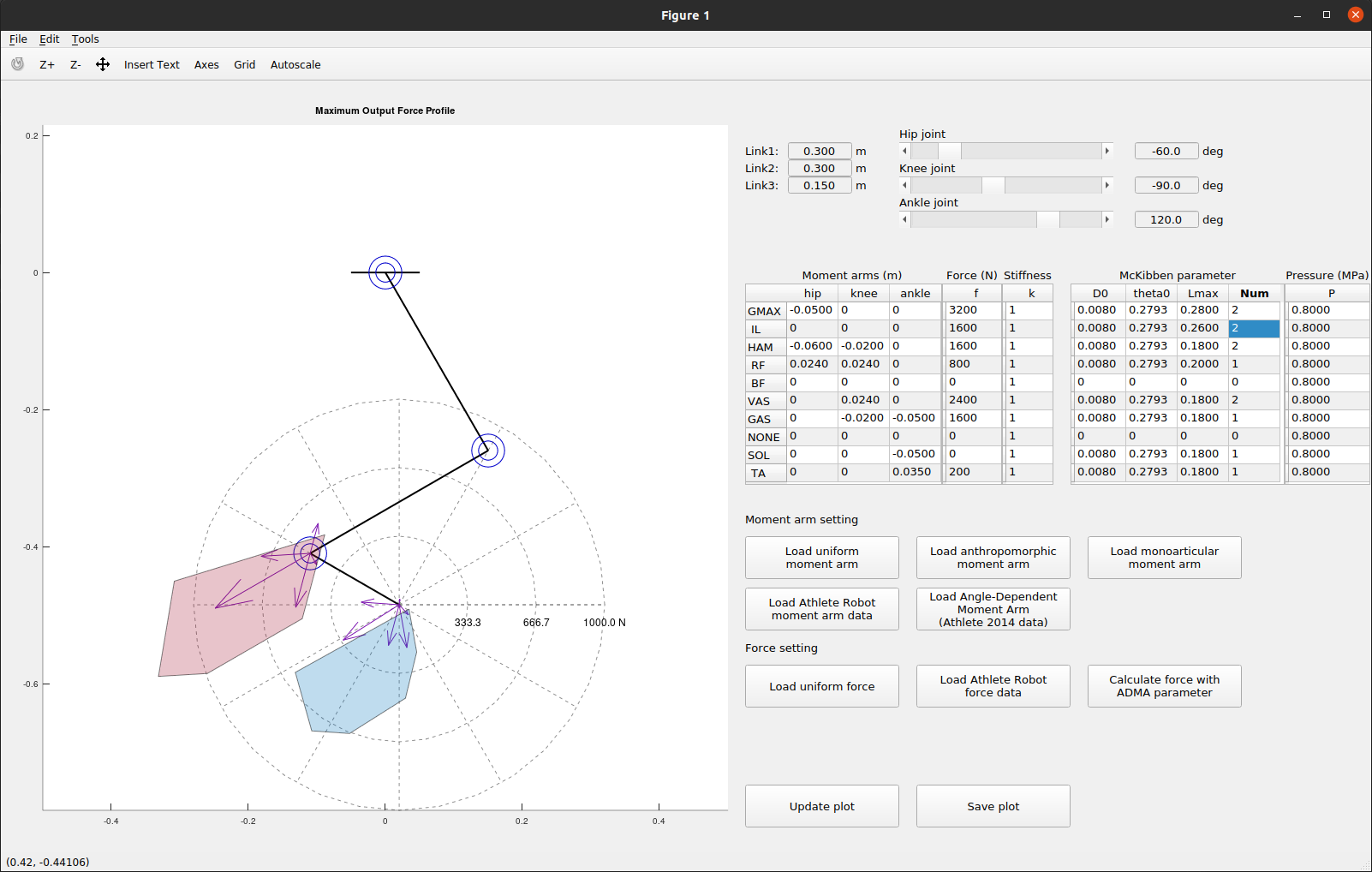
I hold a B.Sc. in Electrical Engineering from Institut Teknologi Bandung (2014) and an M.Sc. in Mechano-Informatics from The University of Tokyo (2018). During my Master’s studies, I conducted research on a bio-inspired humanoid robot, equipping it with artificial muscle actuators to achieve agile, explosive movements.
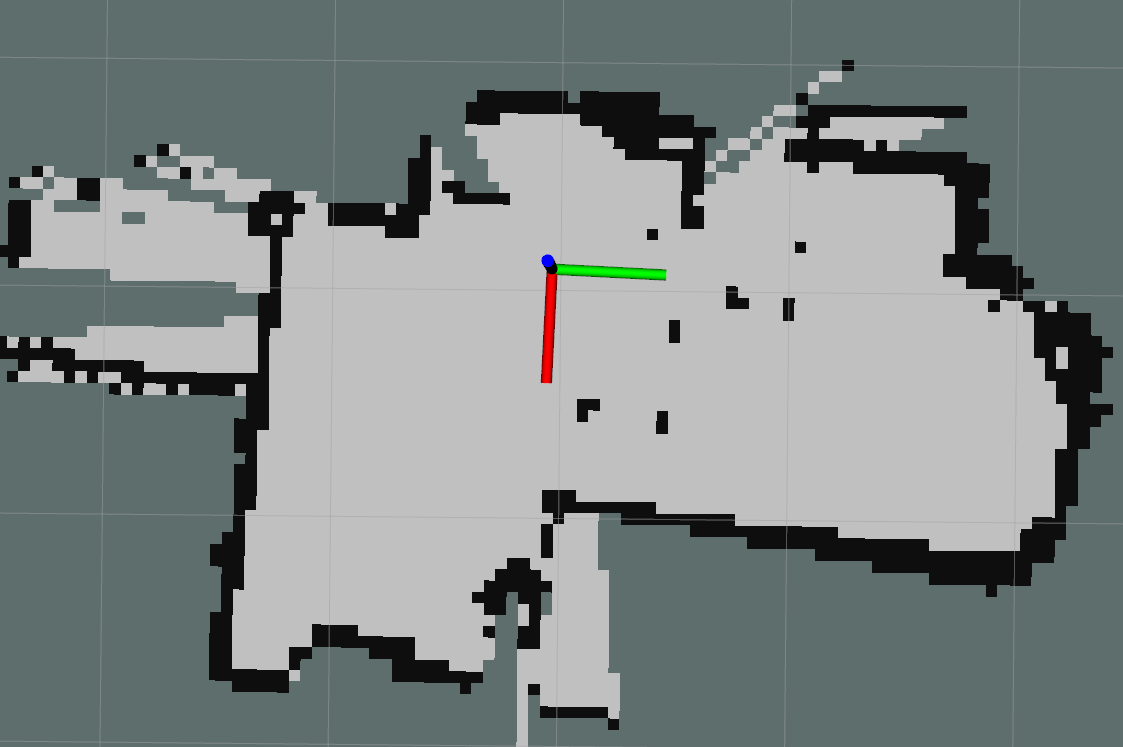
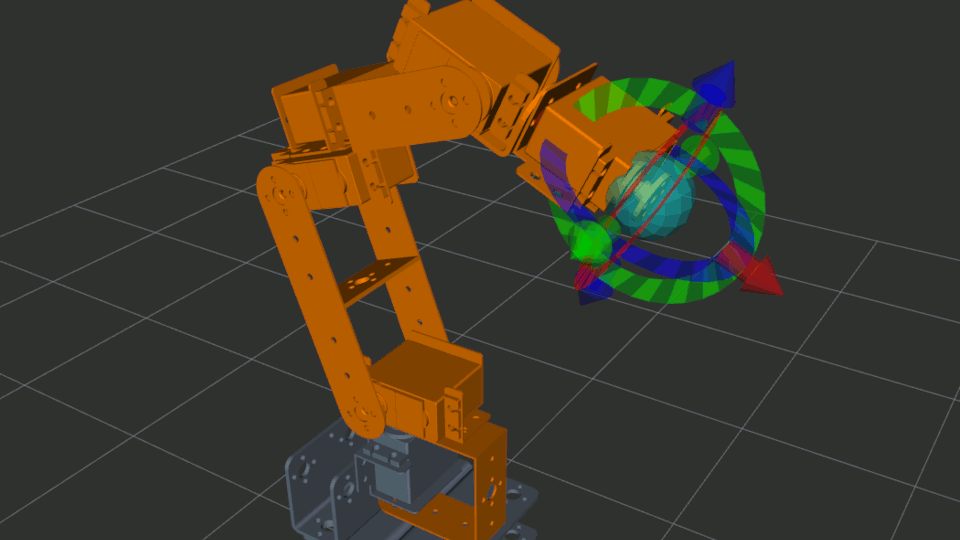
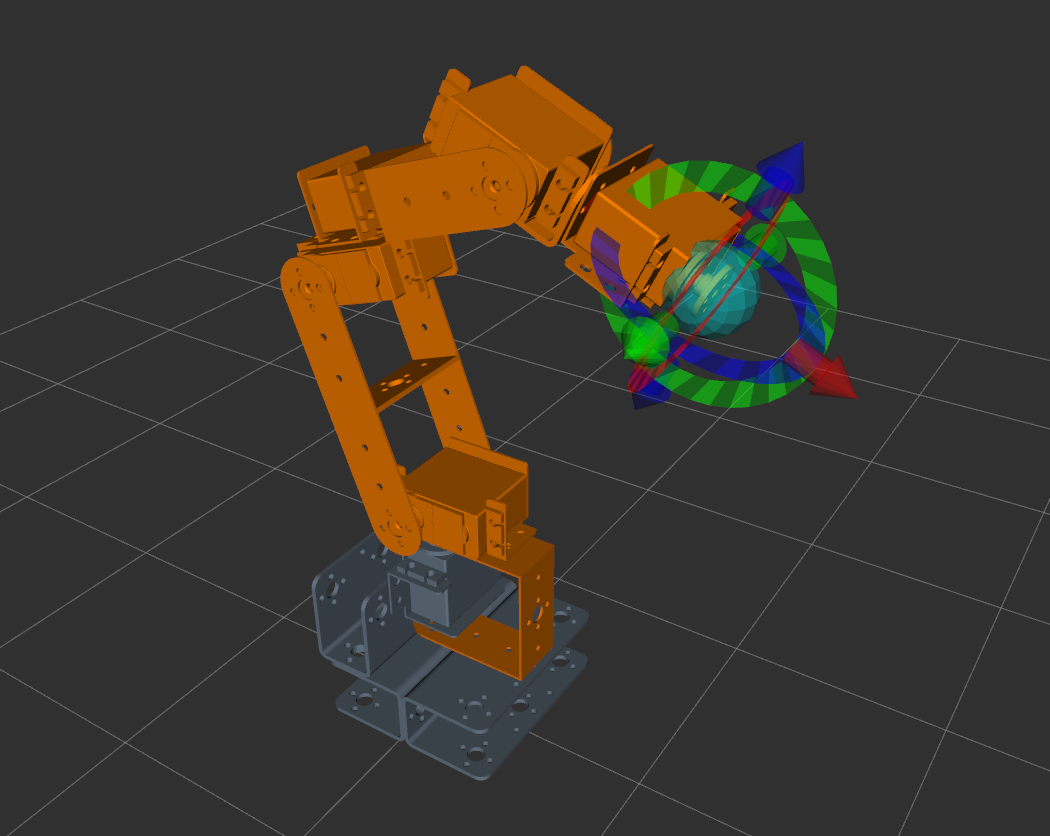
Currently, I work as a Robotics Engineer, gaining hands-on experience in industrial robotics applications. I have developed motion planning and control algorithms for palletizing robot systems and designed specialized stacking algorithms for efficient palletizing.
I’m excited to continue deepening my knowledge and expertise in robotics and intelligent systems, working toward a future where robots play an integral role in our daily lives.