Jacobian Matrix
Notes on Jacobian matrix in robotics.
Introduction
Jacobian matrix defines the relation between joint velocities and end-effector velocities.
Just like forward kinematics from the previous note, which calculates the end-effector positions from the joint angles, Jacobian matrix provides the end-effector velocities from joint angle velocities.
Here, we define the end-effector position as \(\mathbf{x}\) and joint angle as \(\mathbf{q}\).
Formally, a Jacobian is a set of partial derivatives:
\[\mathbf{J} = \frac{\partial \mathbf{x}}{\partial \mathbf{q}}\]Or, if we manipulate a bit so \(\mathbf{J} = \frac{\partial \mathbf{x}}{\partial \mathbf{q}} = \frac{\partial \mathbf{x}}{\partial \mathbf{t}} \frac{\partial \mathbf{t}}{\partial \mathbf{q}}\) , we can get
\[\dot{\mathbf{x}} = \mathbf{J} \dot{\mathbf{q}}\]Then we know that the Jacobian defines the relation between the end-effector velocities and the joint angle velocities.
Linear Velocity Jacobian
The simplest Jacobian matrix provides the relation end-effector linear velocity (we can call it linear velocity Jacobian \(\mathbf{J}_v\)).
Let us write the equation for an \(n\)R planar robot (2D robot in \(n\) joints).
The end-effector velocity is defined as
\[\dot{\mathbf{x}} = \mathbf{J} \dot{\mathbf{q}}\] \[{\begin{bmatrix} \dot{x} \\ \dot{y} \end{bmatrix}}_{2\times1} = {\begin{bmatrix} J_{11} & \dots & J_{1n} \\ J_{21} & \dots & J_{2n} \end{bmatrix}}_{2\times n} {\begin{bmatrix} \dot{q_1} \\ \vdots \\ \dot{q_n} \end{bmatrix}}_{n\times 1}\]From the equation above, we can see that for any joint \(i\), the Jacobian for its end-effector has a dimension of \({2\times i}\) (in 2D space).
Full Jacobian Matrix
A full Jacobian matrix consists of linear velocity part and angular velocity part. Simply,
\[\mathbf{J} = \begin{bmatrix} \mathbf{J}_v \\ \mathbf{J}_{\omega} \end{bmatrix}\]With \(\mathbf{J}_v = \frac{\partial \mathbf{x}}{\partial \mathbf{q}}\) for the linear velocity part and \(\mathbf{J}_{\omega} = \frac{\partial \mathbf{\omega}}{\partial \mathbf{q}}\) for the angular velocity part. \(\mathbf{\omega}\) denotes the angular rotation of the end-effector.
Building the Jacobian Matrix
We have known that a linear velocity Jacobian is
\[\mathbf{J}_v = \frac{\partial \mathbf{x}}{\partial \mathbf{q}}\]So, after we know the position of end-effector \(\mathbf{x_i} = \begin{bmatrix} x_i \\ y_i \end{bmatrix}\) of a joint \(i\), we can easily create the set of partial derivatives for the linear velocity Jacobian as:
\[\mathbf{J}_v = {\begin{bmatrix} \frac{\partial \mathbf{x_i}}{\partial \mathbf{q_1}} & \dots & \frac{\partial \mathbf{x_i}}{\partial \mathbf{q_i}} \\ \frac{\partial \mathbf{y_i}}{\partial \mathbf{q_1}} & \dots & \frac{\partial \mathbf{y_i}}{\partial \mathbf{q_i}} \end{bmatrix}}_{2 \times i}\]The same method applies for the angular velocity Jacobian \(\mathbf{J}_{\omega}\).
Canonical example: 2R robot
Let’s try with an example of a 2R robot.
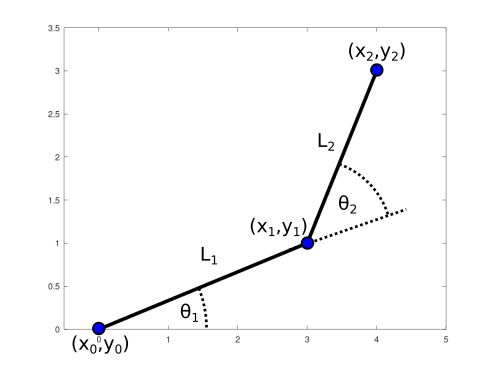
A planar 2-DOF serial link robot
From the previous note, using forward kinematics, we can get the position of end-effector of each joint \(i\) as
\[\textbf{x}_1 = \begin{bmatrix} L_1 c_1 \\ L_1 s_1 \\ 1 \end{bmatrix}\] \[\textbf{x}_2 = \begin{bmatrix} L_1 c_1 + L_2 c_{12} \\ L_1 s_1 + L_2 s_{12} \\ 1 \end{bmatrix}\]With \(c_{1} = cos(q_1)\), \(s_{1} = sin(q_1)\), \(c_{12} = cos(q_1+q_2)\), \(s_{12} = sin(q_1+q_2)\), and \(L_0 = 0\).
The linear velocity Jacobian can be calculated as:
\[{\mathbf{J}_1}_v = \begin{bmatrix} \frac{\partial \mathbf{x_1}}{\partial \mathbf{q_1}}\\ \frac{\partial \mathbf{y_1}}{\partial \mathbf{q_1}} \end{bmatrix} = \begin{bmatrix} -L_1 s_1 \\ L_1 c_1 \\ 0 \end{bmatrix}\] \[{\mathbf{J}_2}_v = \begin{bmatrix} \frac{\partial \mathbf{x_2}}{\partial \mathbf{q_1}} & \frac{\partial \mathbf{x_2}}{\partial \mathbf{q_2}}\\ \frac{\partial \mathbf{y_2}}{\partial \mathbf{q_1}} & \frac{\partial \mathbf{y_2}}{\partial \mathbf{q_2}} \end{bmatrix} = \begin{bmatrix} -L_1 s_1 - L_2 s_{12} & -L_2 s_{12} \\ L_1 c_1 + L_2 c_{12} & L_2 c_{12} \\ 0 & 0 \end{bmatrix}\](Note that we define the position as a \({3\times 1}\) matrix here. So, the Jacobian matrix is \({3\times i}\) matrix)